Home > Information > News
#News ·2025-01-03

This article is reproduced by the authorization of the 3D Vision Heart public number, please contact the source.
Ultra-wideband (UWB) is a short-range, energy-efficient radio communication technology used for accurate positioning detection and relative distance measurement. For example, devices such as Apple's AirTags and Android's SmartTags are growing in popularity due to their ability to accurately track household items.
While UWB has excelled in applications such as motion tracking, such as football matches, it still faces significant challenges in large-scale real-time industrial positioning applications. Currently, most UWB studies are limited to smaller or indoor Settings and run in absolute positioning (AP) mode, as shown in Figure 1. Under these conditions, all base stations must be calibrated, and labels need to be continuously measured from multiple base stations. In occluded environments, however, this becomes impractical. Such limitations reduce the usefulness of UWB in large-scale areas such as ports or warehouses, where obstacles significantly increase the technical difficulty.

The main challenges of using UWB in large-scale outdoor environments include the frequent occurrence of non-line-of-sight (NLoS) problems and interference from other devices, which can limit the effective measurement range. In the worst case, the connection between base stations may be completely lost due to the addition of a new container (as shown in Figure 1). The lack of reliable GPS signals further complicates calibration. Even after the calibration is completed, the system is still difficult to locate in non-line-of-sight conditions, becoming a bottleneck for field robotics and logistics automation.
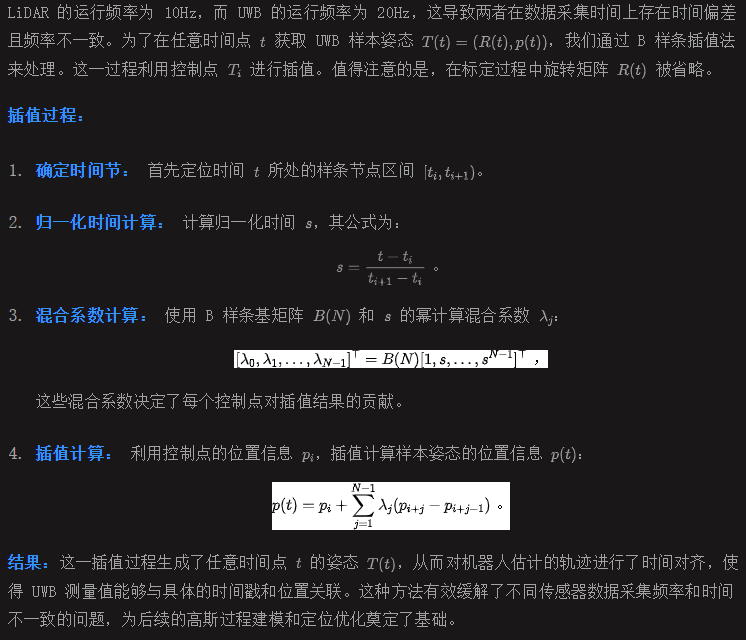
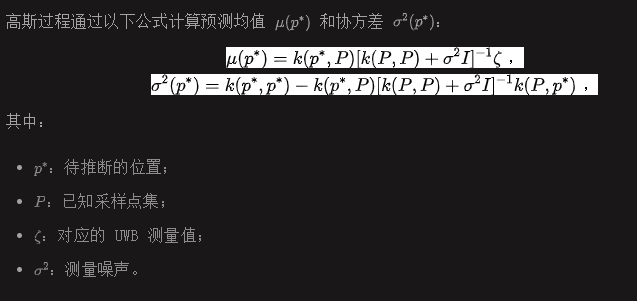
To address these issues, this paper presents a comprehensive approach [1] to address the challenges of large-scale UWB calibration and single location. A continuous time LiDAR inertial odometer (CT-LIO) is used to generate trajectories that can be sampled at any point. By interpolating this trajectory, we align each UWB measurement with its corresponding position. Then, Gaussian process is used to iteratively optimize base station location estimation. Although the standard UWB technology is still unable to locate in non-line-of-sight mode after calibration, to solve this problem, a fast descriptor-based approach is combined to enhance the single global positioning capability in large-scale repetitive environments. Our approach significantly improves existing localization methods and introduces new possibilities that have not been explored before.
Major contributions:


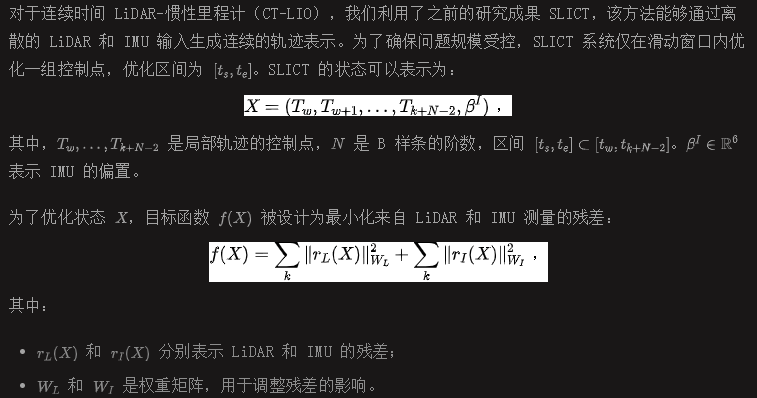
The objective function is minimized by a manifold based optimization solver that relies only on the Eigen library for maximum computational efficiency. This optimization method ensures that continuous time tracks are generated within the specified time window, while dealing with noise and deviation problems in the sensor input.
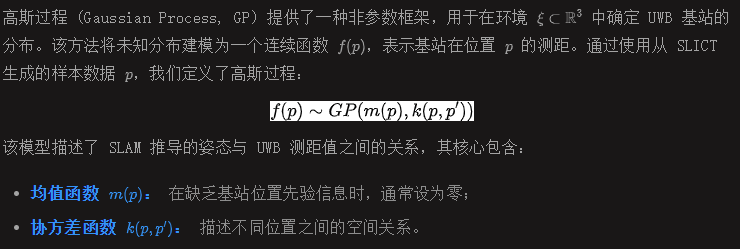
In order to accurately capture spatial relationships, we use the Matern 3/2 kernel function, which can adapt to different levels of smoothness in spatial data:
Among them:
These parameters are adjusted according to the complexity of the environment and the variability of the data to improve the adaptability of the model.
The specific process of calibration base station location is as follows:
Using Gaussian process to calibrate UWB base station location, higher accuracy and robustness can be achieved. Compared with traditional methods, this method can better deal with the problem of base station calibration in complex and non-line-of-sight (NLoS) environments, thus significantly improving the overall positioning performance.
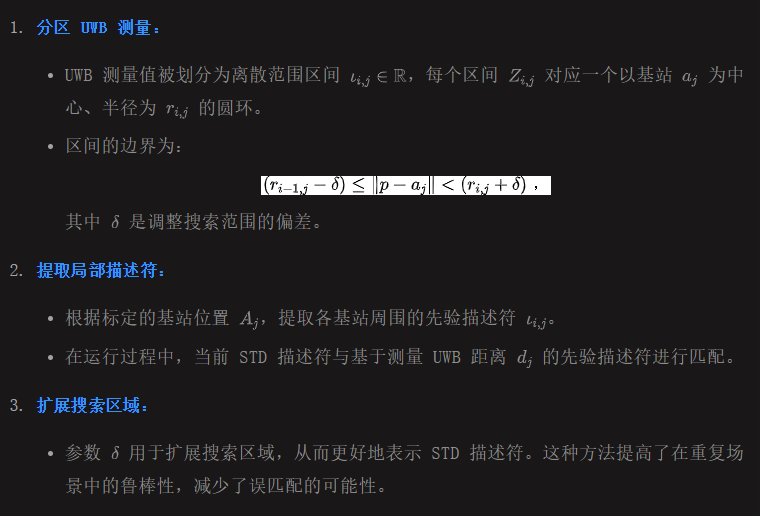
We have improved the Stable Triangle Descriptor (STD) to preferentially match scenes near known UWB base stations. This approach aims to reduce mismatches in large-scale duplicate environments by integrating calibrated UWB base station locations with STD descriptors.
STD relies only on triangular descriptors to identify scenes, but is error-prone in repeating scenes. By combining STD with calibrated UWB data, we introduce range-based partitioning search to enhance location performance.
With the improved STD approach, we have implemented the following single-location processes:

Compared to traditional STD methods, the improved solution combined with UWB base station location has the following advantages:
With this approach, we are able to achieve efficient and accurate single positioning in large-scale repetitive environments, providing a cost-effective solution for industrial logistics and robotics applications.



This paper presents a UWB calibration method for non-line-of-sight (NLoS) problems, using SLICT to generate continuous time trajectories. By sampling the UWB acquired attitude and applying an iterative Gaussian process, we succeeded in achieving a calibration accuracy of about 2 meters in a large-scale environment of 600x450 square meters. Even under non-line-of-sight conditions where traditional UWB positioning fails, the calibrated base station position can be used as a standalone plug-in to improve repeatability and single location success in large-scale environments. Experiments have shown that automated mobile robots for container transport equipped with sparse UWB and on-board LiDAR can achieve accurate single positioning in challenging repetitive environments with minimal cost.

2025-02-17
2025-02-14
2025-02-13

抖音二维码

微信公众号

QQ群:

小红书二维码
friend link


400-000-0000
立即获取方案或咨询
top